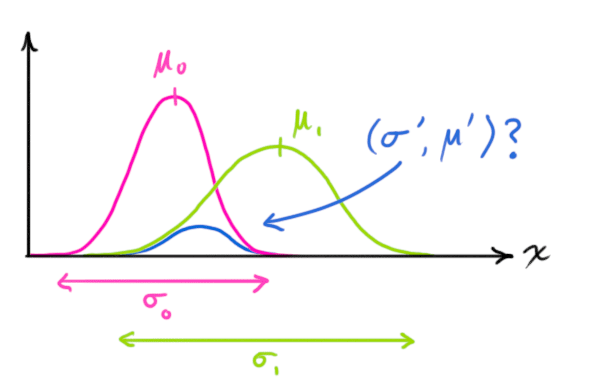
有兩個模型: 一個是系統的狀態模型,另一個是系統的量測模型。這兩個模型都涉及有誤差。 我們可以用系統的狀態模型先預測下一個時間點系統的狀態,而這樣的狀態經過量測模型可以獲得下一個時間點應該有的期望量測值。則這樣的分布假設是 normal
(μ0,Σ0)=(Hkx^k,HkPkHTk) 而在有觀測值出現時,我們知道觀測值有誤差,真正值可_
可能出現在某個分布範圍之內,假設此分布為 normal
(μ1,Σ1)=(zk→,Rk)
因此,我們可以推測真正值應該出現在上述兩分布的交集處。
兩 Normal 分布交集後的分布的mean 與 variance 如下:
μ′σ′2=μ0+σ20(μ1–μ0)σ20+σ21=σ20–σ40σ20+σ21
令 k:
k=σ20σ20+σ21
μ′σ′2=μ0+=σ20–k(μ1–μ0)kσ20
上式可推廣成:
K=Σ0(Σ0+Σ1)−1
μ⃗ ′Σ′=μ0→+=Σ0–K(μ1→–μ0→)KΣ0
K 就是所謂 Kalman gain。
我們將兩 normal 分布交集的上述結果套到,兩模型產生的"觀測"分布中:
Hkx^′kHkP′kHTk=Hkx^k=HkPkHTk+–K(zk→–Hkx^k)KHkPkHTk
Kalman gain 為 :
K=HkPkHTk(HkPkHTk+Rk)−1
消去
Hk
x^′kP′k=x^k=Pk+–K′(zk→–Hkx^k)K′HkPk
K′=PkHTk(HkPkHTk+Rk)−1
我們就得到了 Kalman filter 中的更新步驟(
update step)
x^′k 與 P′k 的更新如上。 .


留言
張貼留言